|
OpenCV 4.10.0
开源计算机视觉
|
加载中...
搜索中...
无匹配项
|
OpenCV 4.10.0
开源计算机视觉
|
前一个教程: Canny 边缘检测器
下一个教程: 霍夫圆变换
| 原作者 | Ana Huamán |
| 兼容性 | OpenCV >= 3.0 |
在本教程中,你将学习如何
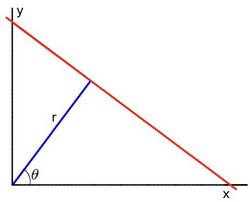
对于霍夫变换,我们将在极坐标系中表示直线。因此,线方程可以写成
\[y = \left ( -\dfrac{\cos \theta}{\sin \theta} \right ) x + \left ( \dfrac{r}{\sin \theta} \right )\]
整理项:\(r = x \cos \theta + y \sin \theta\)
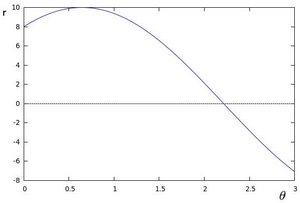
通常对于每个点 \((x_{0}, y_{0})\),我们可以定义经过该点的直线簇为
\[r_{\theta} = x_{0} \cdot \cos \theta + y_{0} \cdot \sin \theta\]
这意味着每对\((r_{\theta},\theta)\)表示一条经过\((x_{0}, y_{0})\)的直线。
我们只考虑\(r > 0\)和\(0< \theta < 2 \pi\)的点。
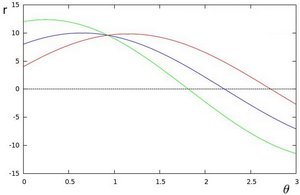
三个曲线在一个点 \((0.925, 9.6)\) 相交,这些坐标是参数 ( \(\theta, r\)),或者是 \((x_{0}, y_{0})\),\((x_{1}, y_{1})\) 及 \((x_{2}, y_{2})\) 所在的线的参数。
OpenCV 实现了两种霍夫线变换
a. 标准霍夫变换
b. 概率霍夫线变换
现在我们将应用霍夫线变换。我们将讲解如何使用 OpenCV 提供的这两个函数。
首先,应用变换
然后,通过绘制线段显示结果。
首先,应用变换
然后,通过绘制线段显示结果。
使用如下输入图像 数独图像。通过使用标准霍夫线变换,我们得到以下结果: 
通过使用概率霍夫线变换,我们得到以下结果: 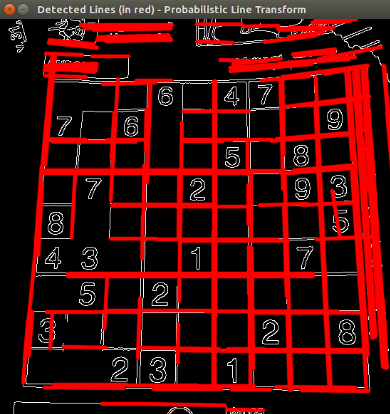
您可能会观察到,当您更改阈值时,检测到的线段数量会有所变化。解释是显而易见的:如果您设定更高的阈值,那么检测到的线段会更少(因为您将需要更多的点来宣告检测到一条线段)。
 1.9.8 为 OpenCV 生成
1.9.8 为 OpenCV 生成