目标
在本章中,我们将学习
理论
OpenCV 提供了三种类型的梯度滤波器或高通滤波器:Sobel、Scharr 和 Laplacian。我们将逐一了解它们。
1. Sobel 和 Scharr 导数
Sobel 算子是联合高斯平滑加微分运算,因此对噪声的抵抗力更强。您可以指定要采用的导数方向,垂直或水平(分别通过参数 yorder 和 xorder)。您还可以通过参数 ksize 指定内核的大小。如果 ksize = -1,则使用 3x3 Scharr 滤波器,它比 3x3 Sobel 滤波器效果更好。请参阅文档以了解使用的内核。
2. Laplacian 导数
它计算图像的 Laplacian,关系式为:\(\Delta src = \frac{\partial ^2{src}}{\partial x^2} + \frac{\partial ^2{src}}{\partial y^2}\),其中每个导数都是使用 Sobel 导数找到的。如果 ksize = 1,则使用以下内核进行过滤
\[kernel = \begin{bmatrix} 0 & 1 & 0 \\ 1 & -4 & 1 \\ 0 & 1 & 0 \end{bmatrix}\]
代码
以下代码在单个图中显示所有算子。所有内核的大小均为 5x5。输出图像的深度传递 -1 以获得 np.uint8 类型的结果。
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
img =
cv.imread(
'dave.jpg', cv.IMREAD_GRAYSCALE)
assert img is not None, "file could not be read, check with os.path.exists()"
sobelx =
cv.Sobel(img,cv.CV_64F,1,0,ksize=5)
sobely =
cv.Sobel(img,cv.CV_64F,0,1,ksize=5)
plt.subplot(2,2,1),plt.imshow(img,cmap = 'gray')
plt.title('Original'), plt.xticks([]), plt.yticks([])
plt.subplot(2,2,2),plt.imshow(laplacian,cmap = 'gray')
plt.title('Laplacian'), plt.xticks([]), plt.yticks([])
plt.subplot(2,2,3),plt.imshow(sobelx,cmap = 'gray')
plt.title('Sobel X'), plt.xticks([]), plt.yticks([])
plt.subplot(2,2,4),plt.imshow(sobely,cmap = 'gray')
plt.title('Sobel Y'), plt.xticks([]), plt.yticks([])
plt.show()
CV_EXPORTS_W Mat imread(const String &filename, int flags=IMREAD_COLOR_BGR)
从文件加载图像。
void Sobel(InputArray src, OutputArray dst, int ddepth, int dx, int dy, int ksize=3, double scale=1, double delta=0, int borderType=BORDER_DEFAULT)
使用扩展的 Sobel 算子计算一阶、二阶、三阶或混合图像导数。
void Laplacian(InputArray src, OutputArray dst, int ddepth, int ksize=1, double scale=1, double delta=0, int borderType=BORDER_DEFAULT)
计算图像的拉普拉斯算子。
结果
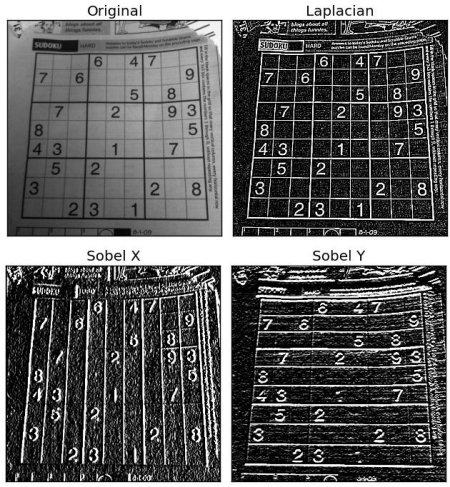
image
一个重要事项!
在我们最后的示例中,输出数据类型是 cv.CV_8U 或 np.uint8。但这里有一个小问题。黑到白的过渡被认为是正斜率(它有一个正值),而白到黑的过渡被认为是负斜率(它具有负值)。因此,当您将数据转换为 np.uint8 时,所有负斜率都会变为零。简而言之,您错过了该边缘。
如果您想检测两个边缘,更好的选择是将输出数据类型保持为更高的形式,如 cv.CV_16S、cv.CV_64F 等,取其绝对值,然后转换回 cv.CV_8U。以下代码演示了水平 Sobel 滤波器的此过程和结果差异。
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
img =
cv.imread(
'box.png', cv.IMREAD_GRAYSCALE)
assert img is not None, "file could not be read, check with os.path.exists()"
sobelx8u =
cv.Sobel(img,cv.CV_8U,1,0,ksize=5)
sobelx64f =
cv.Sobel(img,cv.CV_64F,1,0,ksize=5)
abs_sobel64f = np.absolute(sobelx64f)
sobel_8u = np.uint8(abs_sobel64f)
plt.subplot(1,3,1),plt.imshow(img,cmap = 'gray')
plt.title('Original'), plt.xticks([]), plt.yticks([])
plt.subplot(1,3,2),plt.imshow(sobelx8u,cmap = 'gray')
plt.title('Sobel CV_8U'), plt.xticks([]), plt.yticks([])
plt.subplot(1,3,3),plt.imshow(sobel_8u,cmap = 'gray')
plt.title('Sobel abs(CV_64F)'), plt.xticks([]), plt.yticks([])
plt.show()
查看下面的结果
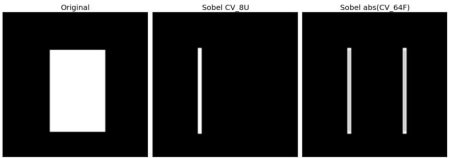
image