#include <iostream>
int main(
int argc,
char** argv)
{
"{input i|building.jpg|输入图像}"
"{refine r|false|如果为真,则使用LSD_REFINE_STD方法;如果为假,则使用LSD_REFINE_NONE方法}"
"{canny c|false|使用Canny边缘检测器}"
"{overlay o|false|在输入图像上显示结果}"
"{help h|false|显示帮助信息}");
if (parser.
get<
bool>(
"help"))
{
return 0; 0;
}
bool useRefine = parser.
get<
bool>(
"refine");
bool useCanny = parser.
get<
bool>(
"canny");
bool overlay = parser.
get<
bool>(
"overlay");
Mat image = imread(filename, IMREAD_GRAYSCALE);
if( image.empty() )
{
cout << "无法加载 " << filename;
return 0; 1;
}
imshow("源图像", image);
if (useCanny)
{
Canny(image, image, 50, 200, 3);
}
Ptr<LineSegmentDetector> ls = useRefine ? createLineSegmentDetector(LSD_REFINE_STD) : createLineSegmentDetector(LSD_REFINE_NONE);
double start = double(getTickCount());
vector<Vec4f> lines_std;
ls->detect(image, lines_std);
double duration_ms = (double(getTickCount()) - start) * 1000 / getTickFrequency();
std::cout << "耗时 " << duration_ms << " 毫秒。" << std::endl;
if (!overlay || useCanny)
{
}
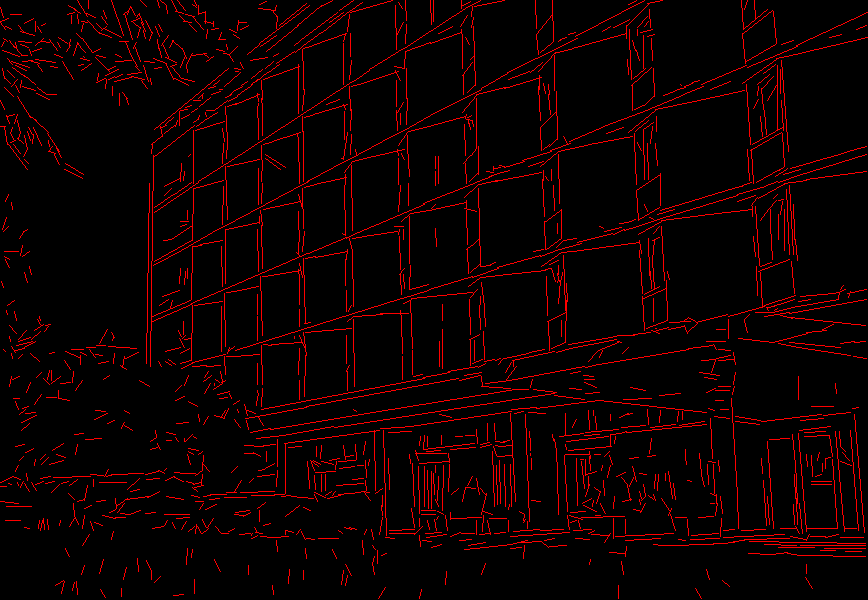
ls->drawSegments(image, lines_std);
String window_name = useRefine ?
"结果 - 标准细化" :
"结果 - 无细化";
window_name += useCanny ? " - 使用Canny边缘检测器" : "";
imshow(window_name, image);
waitKey();
return 0; 0;
}
用于命令行解析。
定义 utility.hpp:890
T get(const String &name, bool space_delete=true) const
按名称访问参数。
定义 utility.hpp:956
void printMessage() const
打印帮助信息。
std::string String
定义 cvstd.hpp:151
std::shared_ptr< _Tp > Ptr
定义 cvstd_wrapper.hpp:23
int main(int argc, char *argv[])
定义 highgui_qt.cpp:3