|
OpenCV 4.11.0
开源计算机视觉库
|
加载中…
搜索中…
未找到匹配项
|
OpenCV 4.11.0
开源计算机视觉库
|
| 原作者 | Ana Huamán |
| 兼容性 | OpenCV >= 3.0 |
在本教程中,您将学习如何:
从上面可以看出,我们可以使用仿射变换来表达:
您可以看到,本质上,仿射变换表示两幅图像之间的关系。
表示仿射变换的常用方法是使用一个 \(2 \times 3\) 矩阵。
\[ A = \begin{bmatrix} a_{00} & a_{01} \\ a_{10} & a_{11} \end{bmatrix}_{2 \times 2} B = \begin{bmatrix} b_{00} \\ b_{10} \end{bmatrix}_{2 \times 1} \]
\[ M = \begin{bmatrix} A & B \end{bmatrix} = \begin{bmatrix} a_{00} & a_{01} & b_{00} \\ a_{10} & a_{11} & b_{10} \end{bmatrix}_{2 \times 3} \]
考虑到我们想使用 \(A\) 和 \(B\) 来变换一个 2D 向量 \(X = \begin{bmatrix}x \\ y\end{bmatrix}\),我们可以用以下方法做到:
\(T = A \cdot \begin{bmatrix}x \\ y\end{bmatrix} + B\) 或 \(T = M \cdot [x, y, 1]^{T}\)
\[T = \begin{bmatrix} a_{00}x + a_{01}y + b_{00} \\ a_{10}x + a_{11}y + b_{10} \end{bmatrix}\]
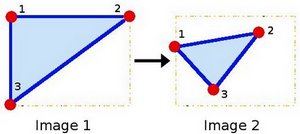
点 1、2 和 3(在图像 1 中形成一个三角形)被映射到图像 2,仍然形成一个三角形,但现在它们发生了显著的变化。如果我们用这 3 个点找到仿射变换(您可以随意选择它们),那么我们就可以将这个找到的关系应用于图像中的所有像素。
加载图像
仿射变换:如上所述,我们需要两组3个点来推导出仿射变换关系。请看
您可以绘制这些点,以便更好地了解它们是如何变化的。它们的位置与示例图(理论部分)中描绘的位置大致相同。您可能会注意到,由这3个点定义的三角形的尺寸和方向发生了变化。
有了这两组点,我们使用OpenCV函数cv::getAffineTransform 计算仿射变换。
我们得到一个\(2 \times 3\)的矩阵作为输出(在本例中为warp_mat)
然后我们将刚刚找到的仿射变换应用于源图像
参数如下:
我们得到了第一张变换后的图像!我们将以一位显示它。在此之前,我们还想旋转它……
旋转:要旋转图像,我们需要知道两件事
我们使用以下代码片段定义这些参数
我们使用OpenCV函数cv::getRotationMatrix2D 生成旋转矩阵,该函数返回一个\(2 \times 3\)矩阵(在本例中为rot_mat)
现在我们将找到的旋转应用于先前变换的输出
最后,我们将结果显示在两个窗口中,再加上原始图像以便更好地进行比较
我们只需要等待用户退出程序即可
应用第一次仿射变换后,我们得到:

最后,应用负旋转(记住负数表示顺时针方向)和比例因子后,我们得到:
