import java.util.ArrayList;
import java.util.List;
import org.opencv.core.Core;
import org.opencv.core.DMatch;
import org.opencv.core.Mat;
import org.opencv.core.MatOfByte;
import org.opencv.core.MatOfDMatch;
import org.opencv.core.MatOfKeyPoint;
import org.opencv.core.Scalar;
import org.opencv.features2d.DescriptorMatcher;
import org.opencv.features2d.Features2d;
import org.opencv.highgui.HighGui;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.xfeatures2d.SURF;
class SURFFLANNMatching {
public void run(String[] args) {
String filename1 = args.length > 1 ? args[0] : "../data/box.png";
String filename2 = args.length > 1 ? args[1] : "../data/box_in_scene.png";
Mat img1 = Imgcodecs.imread(filename1, Imgcodecs.IMREAD_GRAYSCALE);
Mat img2 = Imgcodecs.imread(filename2, Imgcodecs.IMREAD_GRAYSCALE);
if (img1.empty() || img2.empty()) {
System.err.println("无法读取图片!");
System.exit(0);
}
double hessianThreshold = 400;
int nOctaves = 4, nOctaveLayers = 3;
boolean extended = false, upright = false;
SURF detector = SURF.create(hessianThreshold, nOctaves, nOctaveLayers, extended, upright);
MatOfKeyPoint keypoints1 = new MatOfKeyPoint(), keypoints2 = new MatOfKeyPoint();
Mat descriptors1 = new Mat(), descriptors2 = new Mat();
detector.detectAndCompute(img1, new Mat(), keypoints1, descriptors1);
detector.detectAndCompute(img2, new Mat(), keypoints2, descriptors2);
DescriptorMatcher matcher = DescriptorMatcher.create(DescriptorMatcher.FLANNBASED);
List<MatOfDMatch> knnMatches = new ArrayList<>();
matcher.knnMatch(descriptors1, descriptors2, knnMatches, 2);
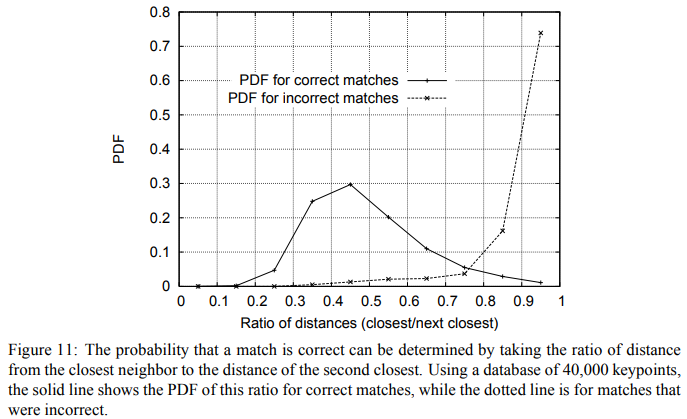
float ratioThresh = 0.7f;
List<DMatch> listOfGoodMatches = new ArrayList<>();
for (int i = 0; i < knnMatches.size(); i++) {
if (knnMatches.get(i).rows() > 1) {
DMatch[] matches = knnMatches.get(i).toArray();
if (matches[0].distance < ratioThresh * matches[1].distance) {
listOfGoodMatches.add(matches[0]);
}
}
}
MatOfDMatch goodMatches = new MatOfDMatch();
goodMatches.fromList(listOfGoodMatches);
Mat imgMatches = new Mat();
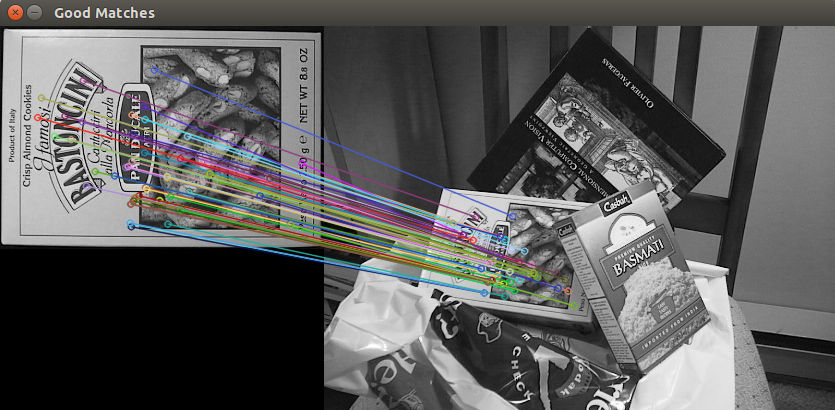
Features2d.drawMatches(img1, keypoints1, img2, keypoints2, goodMatches, imgMatches,
Scalar.
all(-1),
Scalar.
all(-1),
new MatOfByte(), Features2d.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS);
HighGui.imshow("匹配结果", imgMatches);
HighGui.waitKey(0);
System.exit(0);
}
}
public class SURFFLANNMatchingDemo {
public static void main(String[] args) {
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
new SURFFLANNMatching().run(args);
}
}
static Scalar_< _Tp > all(_Tp v0)
返回所有元素均设置为 v0 的标量
Scalar_< double > Scalar
定义 types.hpp:702
 1.9.8 为 OpenCV 生成的
1.9.8 为 OpenCV 生成的