package sample;
import org.opencv.core.*;
import org.opencv.core.Point;
import org.opencv.highgui.HighGui;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
class HoughCirclesRun {
public void run(String[] args) {
String default_file = "../../../../data/smarties.png";
String filename = ((args.length > 0) ? args[0] : default_file);
Mat src = Imgcodecs.imread(filename, Imgcodecs.IMREAD_COLOR);
if( src.empty() ) {
System.out.println("Error opening image!");
System.out.println("Program Arguments: [image_name -- default "
+ default_file +"] \n");
System.exit(-1);
}
Mat gray = new Mat();
Imgproc.cvtColor(src, gray, Imgproc.COLOR_BGR2GRAY);
Imgproc.medianBlur(gray, gray, 5);
Mat circles = new Mat();
Imgproc.HoughCircles(gray, circles, Imgproc.HOUGH_GRADIENT, 1.0,
(double)gray.rows()/16,
100.0, 30.0, 1, 30);
for (int x = 0; x < circles.cols(); x++) {
double[] c = circles.get(0, x);
Point center = new Point(Math.round(c[0]), Math.round(c[1]));
Imgproc.circle(src, center, 1, new Scalar(0,100,100), 3, 8, 0 );
int radius = (int) Math.round(c[2]);
Imgproc.circle(src, center, radius, new Scalar(255,0,255), 3, 8, 0 );
}
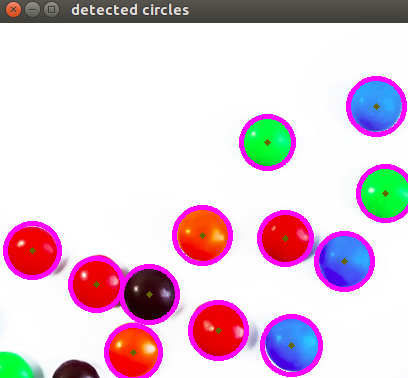
HighGui.imshow("detected circles", src);
HighGui.waitKey();
System.exit(0);
}
}
public static void main(String[] args) {
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
new HoughCirclesRun().run(args);
}
}
void HoughCircles(InputArray image, OutputArray circles, int method, double dp, double minDist, double param1=100, double param2=100, int minRadius=0, int maxRadius=0)
使用霍夫变换在灰度图像中查找圆形。