|
OpenCV 4.11.0
开源计算机视觉
|
加载中…
搜索中…
无匹配项
|
OpenCV 4.11.0
开源计算机视觉
|
这个 3D 部件 通过其坐标轴或视锥体来表示场景中的相机位置。: 更多…
#include <opencv2/viz/widgets.hpp>
公共成员函数 | |
| WCameraPosition (const Matx33d &K, double scale=1.0, const Color &color=Color::white()) | |
| 显示视锥体。 | |
| WCameraPosition (const Matx33d &K, InputArray image, double scale=1.0, const Color &color=Color::white()) | |
| 在视锥体的远平面显示图像。 | |
| WCameraPosition (const Vec2d &fov, double scale=1.0, const Color &color=Color::white()) | |
| 显示视锥体。 | |
| WCameraPosition (const Vec2d &fov, InputArray image, double scale=1.0, const Color &color=Color::white()) | |
| 在视锥体的远平面显示图像。 | |
| WCameraPosition (double scale=1.0) | |
| 在原点创建相机坐标系。 | |
 从 cv::viz::Widget3D 继承的公共成员函数 从 cv::viz::Widget3D 继承的公共成员函数 | |
| Widget3D () | |
| void | applyTransform (const Affine3d &transform) |
| 使用给定的变换转换内部部件数据(即点、法线)。 | |
| Affine3d | getPose () const |
| 返回部件的当前姿态。 | |
| void | setColor (const Color &color) |
| 设置部件的颜色。 | |
| void | setPose (const Affine3d &pose) |
| 设置部件的姿态。 | |
| void | updatePose (const Affine3d &pose) |
| 通过预乘其当前姿态来更新部件的姿态。 | |
| 从 cv::viz::Widget 继承的公共成员函数 | |
| Widget () | |
| Widget (const Widget &other) | |
| virtual | ~Widget () |
| template<typename _W > | |
| _W | cast () const |
| 将一个部件转换为另一个部件。 | |
| template<> | |
| Widget2D | cast () const |
| 实用程序导出。 | |
| template<> | |
| Widget3D | cast () const |
| template<> | |
| 到 WLine 的转换 | cast () const |
| template<> | |
| 到 WPlane 的转换 | cast () const |
| template<> | |
| 到 WSphere 的转换 | cast () const |
| template<> | |
| 到 WCylinder 的转换 | cast () const |
| template<> | |
| 到 WArrow 的转换 | cast () const |
| template<> | |
| 到 WCircle 的转换 | cast () const |
| template<> | |
| 到 WCone 的转换 | cast () const |
| template<> | |
| 到 WCube 的转换 | cast () const |
| template<> | |
| 到 WCoordinateSystem 的转换 | cast () const |
| template<> | |
| 到 WPolyLine 的转换 | cast () const |
| template<> | |
| 到 WGrid 的转换 | cast () const |
| template<> | |
| 到 WText3D 的转换 | cast () const |
| template<> | |
| 到 WText 的转换 | cast () const |
| template<> | |
| 到 WImageOverlay 的转换 | cast () const |
| template<> | |
| 到 WImage3D 的转换 | cast () const |
| template<> | |
| 到 WCameraPosition 的转换 | cast () const |
| template<> | |
| 到 WTrajectory 的转换 | cast () const |
| template<> | |
| 到 WTrajectoryFrustums 的转换 | cast () const |
| template<> | |
| 到 WTrajectorySpheres 的转换 | cast () const |
| template<> | |
| 到 WCloud 的转换 | cast () const |
| template<> | |
| 到 WPaintedCloud 的转换 | cast () const |
| template<> | |
| 到 WCloudCollection 的转换 | cast () const |
| template<> | |
| 到 WCloudNormals 的转换 | cast () const |
| template<> | |
| 到 WMesh 的转换 | cast () const |
| template<> | |
| 到 WWidgetMerger 的转换 | cast () const |
| double | getRenderingProperty (int property) const |
| 返回部件的渲染属性。 | |
| Widget & | operator= (const Widget &other) |
| void | setRenderingProperty (int property, double value) |
| 设置部件的渲染属性。 | |
其他继承的成员 | |
| 从 cv::viz::Widget 继承的静态公共成员函数 | |
| static Widget | fromPlyFile (const String &file_name) |
| 从 ply 文件创建部件。 | |
这个 3D 部件 通过其坐标轴或视锥体来表示场景中的相机位置。
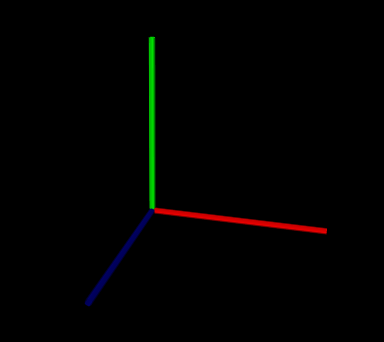
| cv::viz::WCameraPosition::WCameraPosition | ( | 双精度浮点数 | scale = 1.0 | ) |
在原点创建相机坐标系。
| cv::viz::WCameraPosition::WCameraPosition | ( | const Matx33d & | K, |
| 双精度浮点数 | scale = 1.0, | ||
| const Color & | color = Color::white() ) |
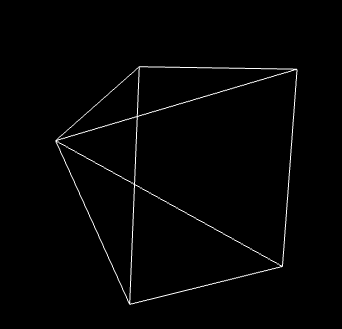
| cv::viz::WCameraPosition::WCameraPosition | ( | const Vec2d & | fov, |
| 双精度浮点数 | scale = 1.0, | ||
| const Color & | color = Color::white() ) |
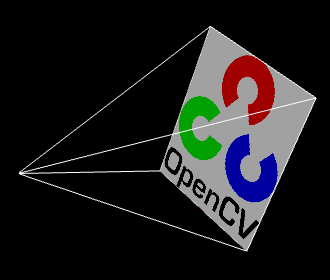
| cv::viz::WCameraPosition::WCameraPosition | ( | const Matx33d & | K, |
| InputArray | image, | ||
| 双精度浮点数 | scale = 1.0, | ||
| const Color & | color = Color::white() ) |
在视锥体的远平面显示图像。
| K | 相机的内参矩阵。 |
| image | 将要在视锥体远平面显示的BGR或灰度图像。 |
| scale | 视锥体和图像的比例。 |
| color | Color视锥体的颜色。 |
基于相机的内参矩阵K创建相机的视角视锥体,并在远端平面上显示图像。
| cv::viz::WCameraPosition::WCameraPosition | ( | const Vec2d & | fov, |
| InputArray | image, | ||
| 双精度浮点数 | scale = 1.0, | ||
| const Color & | color = Color::white() ) |
在视锥体的远平面显示图像。
| fov | 相机的视野(水平,垂直)。 |
| image | 将要在视锥体远平面显示的BGR或灰度图像。 |
| scale | 视锥体和图像的比例。 |
| color | Color视锥体的颜色。 |
基于相机的内参矩阵K创建相机的视角视锥体,并在远端平面上显示图像。